名古屋大学との産学連携~次世代の交通情報サービスの実現
公道実証実験の検証により、ダイナミックマップ2.0の仕様への反映、信頼性の向上に貢献。
01
Background
背景
次世代交通情報サービスの実現に向け、
センサ情報の共有、認識、さらなる拡張が求められる。
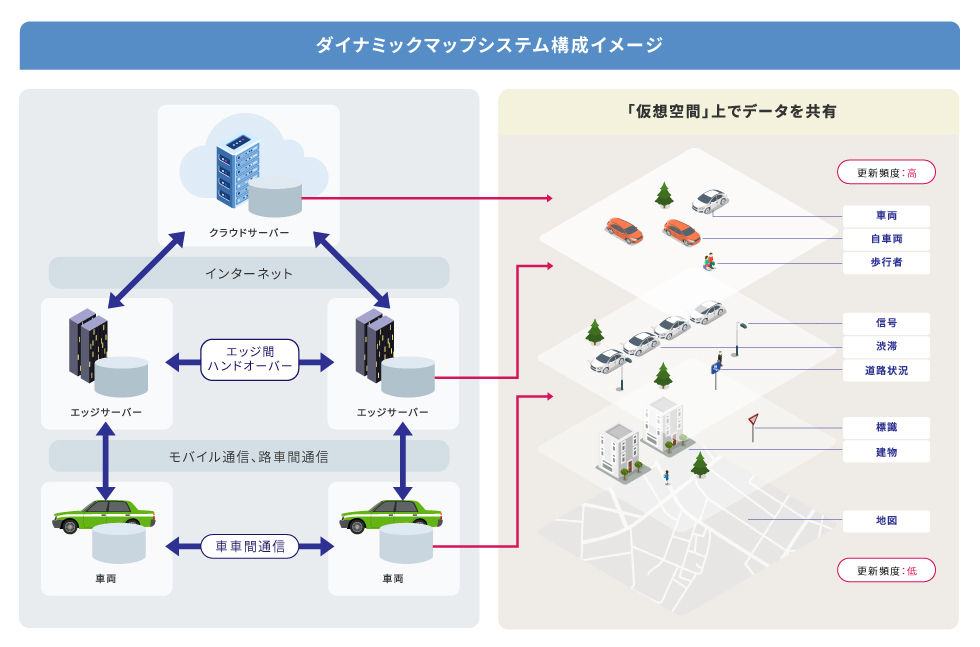
自動車に搭載されたセンサの高度化によって、周囲の走行環境を詳しく認識できるようになり、ドライバへの警告や危機回避を自動で行う安全運転支援システム、自律走行を可能とする自動運転システムなどの研究が加速しています。しかし、現状では車両単体からセンサで認識できる範囲は非常に限定的。道路上に存在する周囲の車両や道路インフラ装置のセンサが検出した情報を、通信を介して共有し、認識できる範囲を拡張することが重要な課題となっています。MSEでは、センサ情報を通信によって共有し、高精度道路地図と統合利用するダイナミックマップの機能を現実的にどのようなシステムにしていくかを研究し解決に向けた活動を行なっています。
02
What we did
MSEがやったこと
培ってきた技術と大学・他企業の知見を活かし、
システム検討、実証実験を通じて課題解決へ貢献。
MSEは、2015年から名古屋大学との産学連携を開始。次世代の交通情報サービスの実現に向けて、社内で培ってきた技術を活かし、システムの検討、実証実験による技術課題の解決に取り組んできています。2016年にはダイナミックマップ2.0コンソーシアムが立ち上がり、大学の教授の方々や共同研究開発機関として参加している複数の企業と議論を重ね、研究テーマに沿ったシステムの構築を行なっています。また、社会実装に向けての取り組みとして、公道実証実験を繰り返し、課題解決への貢献を行ってきました。
03
Result
成果
公道実証実験の検証により、
ダイナミックマップ2.0の仕様への反映、信頼性の向上に貢献。
毎年、共同研究開発テーマを決めてシステムの構築を行い、以下のような公道実証実験での検証により、ダイナミックマップ2.0の仕様への反映、信頼性の向上に貢献することができました。
・ダイナミックマップを用いた合流調停の公道実験 (2018年11月)
・ダイナミックマップを用いた後続車への道譲り支援の実験 (2020年2月)