Academic-industrial collaboration with Nagoya University: realizing next-generation transportation information services
Contributing to reflecting the review results of public road demonstration experiments upon Dynamic Map 2.0 specifications
in addition to improving its reliability
01
Background
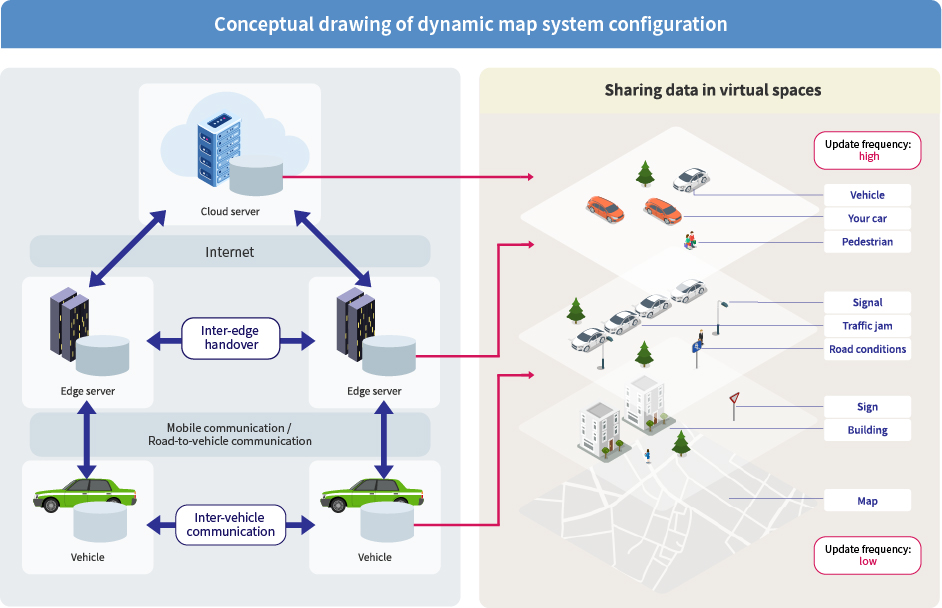
The sharing, recognition and further expansion of sensor information are necessary to realize next-generation transportation information services.
With increased improvements of sensors installed in automobiles, it has become possible to recognize surrounding vehicle-running conditions in detail, thereby accelerating the studies of safe driving support systems to automatically warn drivers and avoid accidents, automatic driving systems to enable autonomous running, etc. However, the range of recognition by sensors from a single vehicle is still very limited, thus posing a key challenge of sharing information detected by sensors on surrounding vehicles on the road and in road infrastructure equipment via communication, effectively expanding the range that can be recognized. Towards a solution, NTT DATA MSE is engaged in activities to study what systems in reality must be created for dynamic map functions that share sensor information via communication and that are integrated and used with high-precision roadmaps.
02
What we did
Contributing to solving challenges through studying systems and their demonstration experiments by taking advantage of technologies we have cultivated in addition to the knowledge of universities and other companies
In 2015, MSE started an academic-industrial collaboration with Nagoya University. Towards the realization of next-generation transportation information services, we have taken advantage of our technologies to strive to solve technological challenges through system studies and demonstration experiments. In 2016, the Dynamic Map 2.0 Consortium was established. We have had many discussions with university professors and multiple companies participating as joint R&D institutions and have been engaged in building systems in line with study themes. In addition, as an initiative for social implementation, we have repeated public road demonstration experiments, as contributions to solving challenges.
03
Result
Contributing to reflecting the review results of public road demonstration experiments upon Dynamic Map 2.0 specifications in addition to improving its reliability
Every year, we establish a joint R&D theme, built a system and by reviewing the results of public road demonstration experiments as shown below, we contributed to reflecting them upon Dynamic 2.0 specifications as well as improving its reliability:
•Public road experiment of merging control using a dynamic map (November 2018)
•Experiment of a support system for giving way to following vehicles using a dynamic map (February 2020)